三菱サーボMR-J4-Aシリーズを位置決めユニットQD75P1N、QD75P2N、QD75P4N、QD75D1N、QD75D2N、QD75D4Nで制御する方法:設定からラダープログラムまで徹底解説
●三菱サーボMR-J4-Aシリーズを位置決めユニットQD75P1N、QD75P2N、QD75P4N、QD75D1N、QD75D2N、QD75D4Nで制御する方法:設定からラダープログラムまで徹底解説
インターロックを取り、必要に応じてアドレスの変更、バッファメモリの変更さえすれば、サーボの位置決めを制御することが可能です。
ここでは、CPUをQ03UDVCPU、位置決めユニットをQD75D4Nで作成しています。
QD75D4NのシーケンサCPUに対する入出力信号一覧
QD75D4N → CPUユニット
X0 QD75 準備完了
X1 同期用フラグ
X2 使用禁止
X3 使用禁止
X4 軸1 MコードON
X5 軸2 MコードON (QD75P2N、QD75P4N、QD75D2N、QD75D4N、のみ)
X6 軸3 MコードON (QD75P4N、QD75D4N、のみ)
X7 軸4 MコードON (QD75P4N、QD75D4N、のみ)
X8 軸1 エラー検出
X9 軸2 エラー検出 (QD75P2N、QD75P4N、QD75D2N、QD75D4N、のみ)
XA 軸3 エラー検出 (QD75P4N、QD75D4N、のみ)
XB 軸4 エラー検出 (QD75P4N、QD75D4N、のみ)
XC 軸1 BUSY
XD 軸2 BUSY (QD75P2N、QD75P4N、QD75D2N、QD75D4N、のみ)
XE 軸3 BUSY (QD75P4N、QD75D4N、のみ)
XF 軸4 BUSY (QD75P4N、QD75D4N、のみ)
X10 軸1 始動完了
X11 軸2 始動完了 (QD75P2N、QD75P4N、QD75D2N、QD75D4N、のみ)
X12 軸3 始動完了 (QD75P4N、QD75D4N、のみ)
X13 軸4 始動完了 (QD75P4N、QD75D4N、のみ)
X14 軸1 位置決め完了
X15 軸2 位置決め完了 (QD75P2N、QD75P4N、QD75D2N、QD75D4N、のみ)
X16 軸3 位置決め完了 (QD75P4N、QD75D4N、のみ)
X17 軸4 位置決め完了 (QD75P4N、QD75D4N、のみ)
X18 使用禁止
X19 使用禁止
X1A 使用禁止
X1B 使用禁止
X1C 使用禁止
X1D 使用禁止
X1E 使用禁止
X1F 使用禁止
CPUユニット → QD75D4N
Y0 シーケンサレディ
Y1 使用禁止
Y2 使用禁止
Y3 使用禁止
Y4 軸1 軸停止
Y5 軸2 軸停止
Y6 軸3 軸停止
Y7 軸4 軸停止
Y8 軸1 正転JOG始動
Y9 軸1 逆転JOG始動
YA 軸2 正転JOG始動 (QD75P2N、QD75P4N、QD75D2N、QD75D4N、のみ)
YB 軸2 逆転JOG始動 (QD75P2N、QD75P4N、QD75D2N、QD75D4N、のみ)
YC 軸3 正転JOG始動 (QD75P4N、QD75D4N、のみ)
YD 軸3 逆転JOG始動 (QD75P4N、QD75D4N、のみ)
YE 軸4 正転JOG始動 (QD75P4N、QD75D4N、のみ)
YF 軸4 逆転JOG始動 (QD75P4N、QD75D4N、のみ)
Y10 軸1 位置決め始動
Y11 軸2 位置決め始動 (QD75P2N、QD75P4N、QD75D2N、QD75D4N、のみ)
Y12 軸3 位置決め始動 (QD75P4N、QD75D4N、のみ)
Y13 軸4 位置決め始動 (QD75P4N、QD75D4N、のみ)
Y14 軸1 実行禁止フラグ
Y15 軸2 実行禁止フラグ (QD75P2N、QD75P4N、QD75D2N、QD75D4N、のみ)
Y16 軸3 実行禁止フラグ (QD75P4N、QD75D4N、のみ)
Y17 軸4 実行禁止フラグ (QD75P4N、QD75D4N、のみ)
Y18 使用禁止
Y19 使用禁止
Y1A 使用禁止
Y1B 使用禁止
Y1C 使用禁止
Y1D 使用禁止
Y1E 使用禁止
Y1F 使用禁止
バッファメモリ
関連するバッファメモリのみ記載していきます。
先頭XYを0000とした場合のバッファメモリのアドレス表記としています。
U0¥G72 軸1 原点アドレス
U0¥G800 軸1 送り現在値
U0¥G804 軸1 送り速度
U0¥G806 軸1 軸エラー番号
U0¥G807 軸1 軸ワーニング番号
U0¥G816 軸1 外部入力信号
U0¥G817 軸1 ステータス
U0¥G835 軸1 実行中位置決めデータNo.
U0¥G1500 軸1 位置決め始動番号
U0¥G1518 軸1 JOG速度
U0¥G2000 軸1 No.1 位置決め識別子
U0¥G2001 軸1 No.1 Mコード
U0¥G2002 軸1 No.1 ドウェルタイム
U0¥G2004 軸1 No.1 指令速度
U0¥G2006 軸1 No.1 位置決めアドレス
U0¥G2008 軸1 No.1 円弧アドレス
まず、最小限の設定を行っていきます。
三菱電機のGX Works2を使用します。
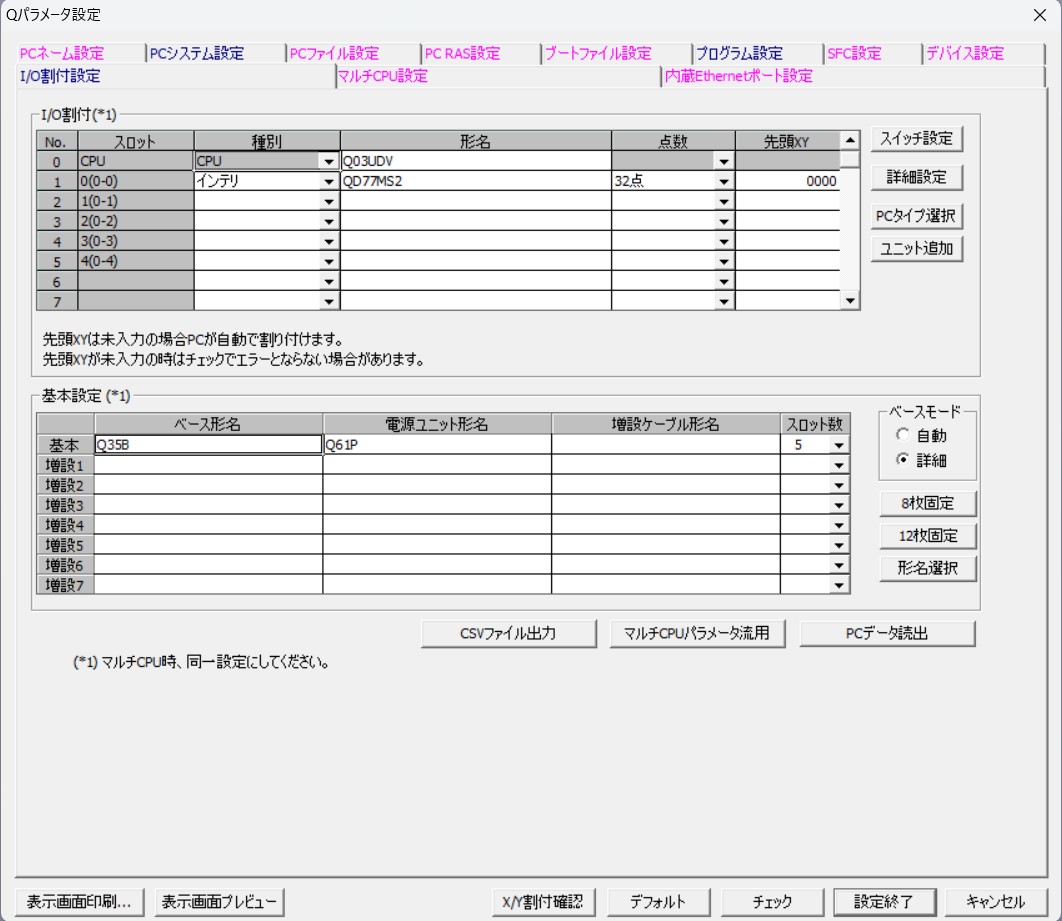
PCパラメータのI/O割付設定を下記の通り設定します。
CPUの型名は使用する型に合わせてください。ここでは、Q03UDVとしています。
位置決めユニットQD75D4Nをスロット0に先頭XYが0000で割付しています。
電源ユニットをQ61P、ベースユニットQ35B、スロット数5なども割付しています。
三菱電機のGX Works2を使用します。
PCパラメータのI/O割付設定を下記の通り設定します。
CPUの型名は使用する型に合わせてください。ここでは、Q03UDVとしています。
位置決めユニットQD75D4Nをスロット0に先頭XYが0000で割付しています。
電源ユニットをQ61P、ベースユニットQ35B、スロット数5なども割付しています。

PCパラメータのプログラム設定を下記の通り設定します。
今回のプログラムはMAINのみとなります。

インテリジェント機能ユニット→0000:QD75D4N→パラメータの設定を下記の通り設定します

今回は軸1のみの設定をしていきます。
三菱電機のサーボモータMR-J4-Aは分解能4194304P/Rとなります。
モータ1回転あたりの移動量を5.000mmとしてパラメータ設定していきます。


MR-Configurator2のパラメータも設定していきます。

設定項目は以上です。
作成するプログラムの一覧です。
MAINのみとなります。

次はラダープログラムです。
・MAIN

















以外にもさまざまな構成のラダープログラムも作成しております。


コメント
コメントを投稿